Project Description
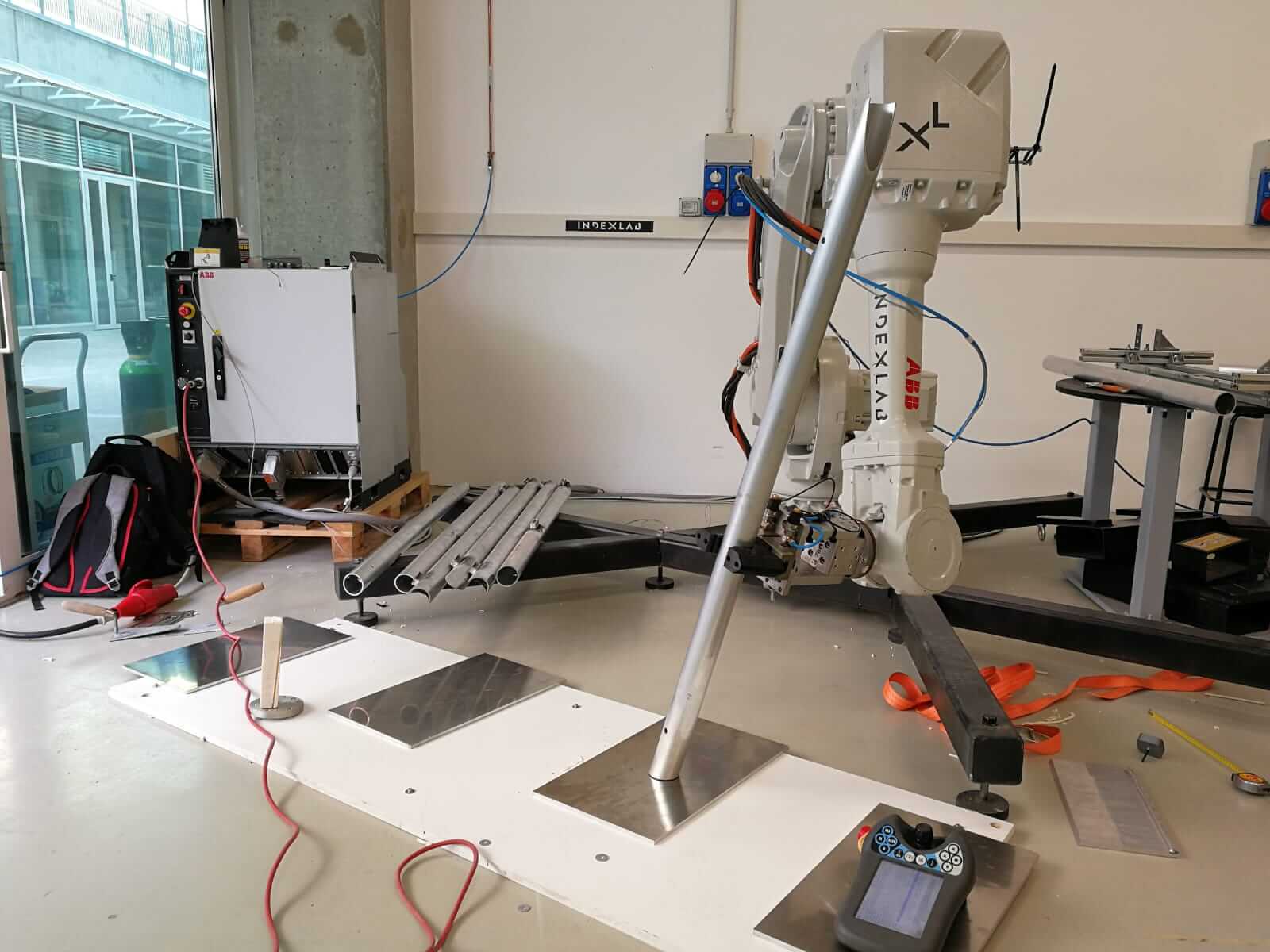
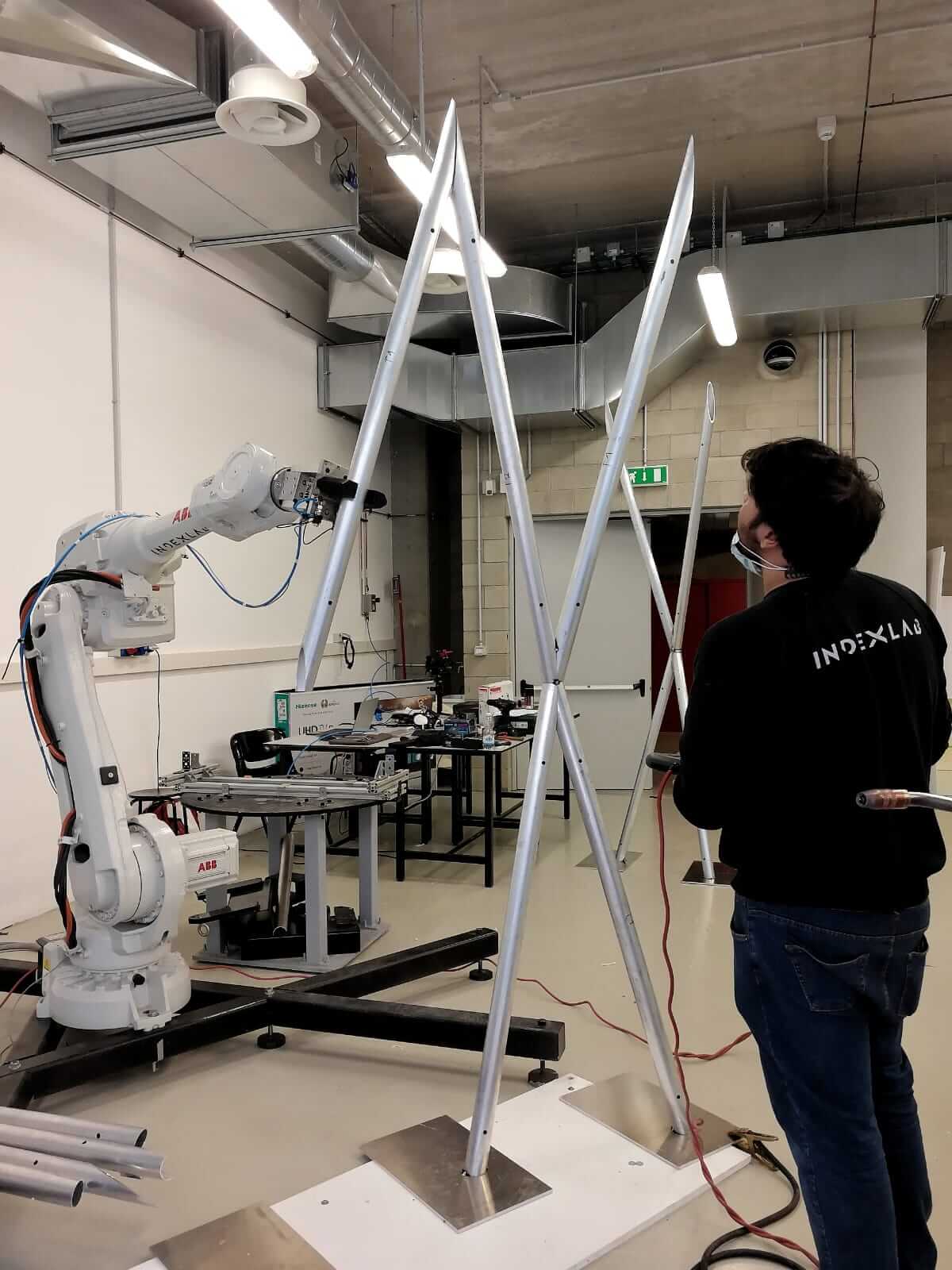
Aluminum Sabers is a prototype of a robotic-aided aluminum welding system for CNC machined components. Through a pick and place process each component is placed in the desired position by a robotic cell where the elements are then manually welded together from a human operator. This workflow leverages the precision and speed of robotic manipulators and flexibility of algorithmic programming. The end result is a robotic cell capable of reliably and accurately placing all the necessary components in 3D space. This simplifies the welder’s task by reducing the prep-work for each weld and effectively speeding up the production process. Each operator could then weld different structures simultaneously relying on the robot for the overall planning.
images courtesy of INDEXLAB
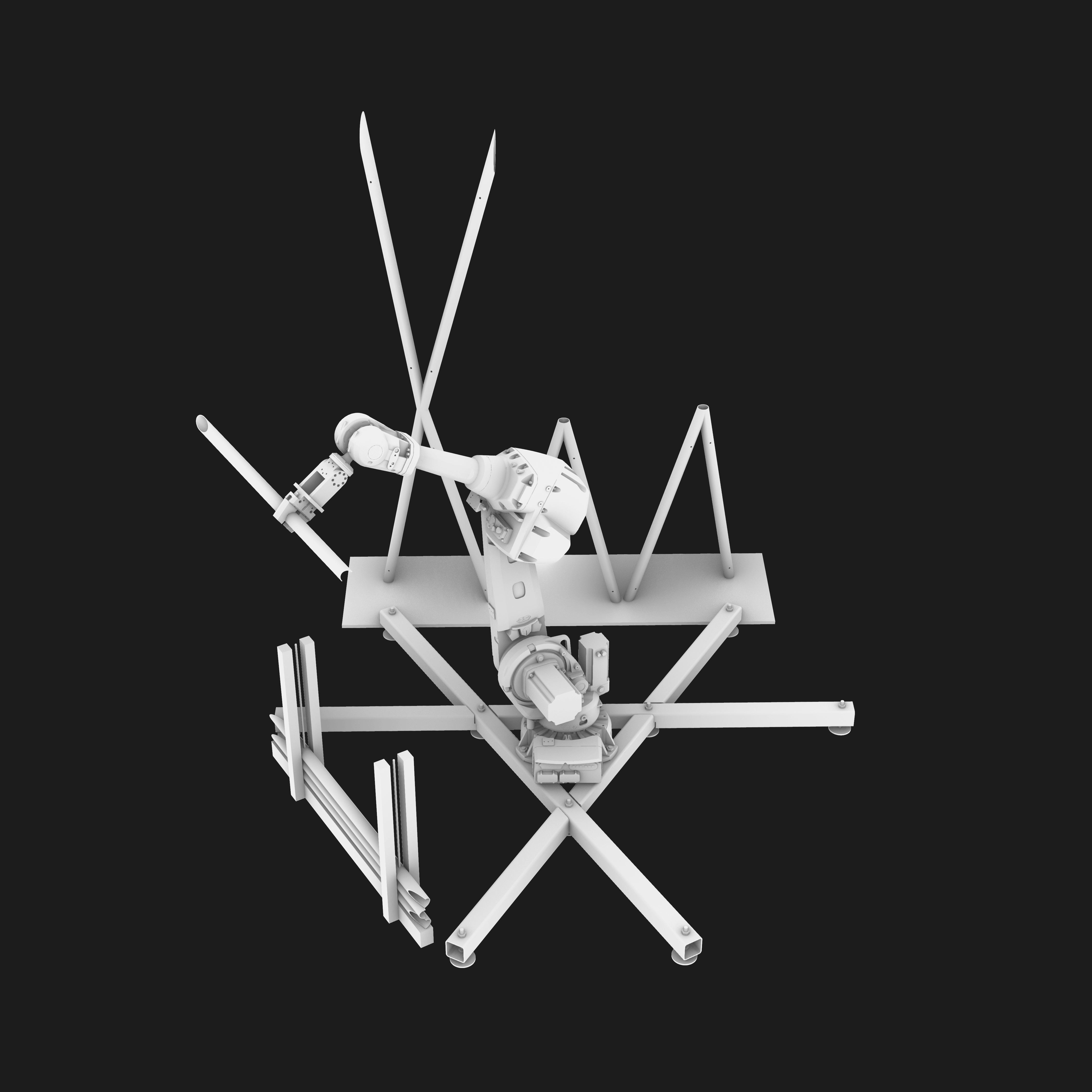
Robotic Simulation
The robotic cell is composed of a robotic manipulator with a pneumatic vacuum gripper. The gripper’s control and configuration (open or closed) are automated and integrated in the source code of the production files. Each pick-and-place loop utilizes the same waypoints and motion types allowing for a predictable behavior of the robotic cell. The toolpaths are simulated before production ensuring that there are no collisions between the picked element and the robot itself and its surroundings.
The Algorithmic Approach
The algorithmic approach used to assemble Aluminum Sabers is scalable and adaptable to different designs and shapes. The robotic post processor is directly integrated in the computational workflow, automatically generating the robot source code for every element of the design. The computational approach significantly limits the amount of manual configurations necessary for the cells deployment. Once calibrated a cell can be used to manufacture multiple designs with minimum downtime between each production run.

images courtesy of INDEXLAB
images courtesy of INDEXLAB

images courtesy of INDEXLAB
images courtesy of INDEXLAB